Swerve Configuration
開始寫 swerve 的程式前,你需要搜集你的機器人特定的 constant,而它會被用
來配置你的 swerve。所有的 constant 都會記錄在 Constants.java.
Motor & Sensor IDs
請紀錄 rotor 和 throttle 馬達的 CAN IDs。
1// Rotor IDs
2public static final int kLeftFrontRotorID = 0;
3public static final int kRightFrontRotorID = 0;
4public static final int kLeftRearRotorID = 0;
5public static final int kRightRearRotorID = 0;
6
7// Throttle IDs
8public static final int kLeftFrontThrottleID = 0;
9public static final int kRightFrontThrottleID = 0;
10public static final int kLeftRearThrottleID = 0;
11public static final int kRightRearThrottleID = 0;
請紀錄 rotor encoders 和 IMU 的 CAN 或 analog IDs(若是用 navX 可以跳過這一步)。
1// Rotor Encoder IDs
2public static final int kLeftFrontRotorEncoderID = 0;
3public static final int kRightFrontRotorEncoderID = 0;
4public static final int kLeftRearRotorEncoderID = 0;
5public static final int kRightRearRotorEncoderID = 0;
6
7// IMU ID
8public static final int kImuID = 0;
Rotor Encoder 偏移量
為了讓 swerve modules 的角度可以同步,你需要補償 rotor encoder 可能的偏移量。
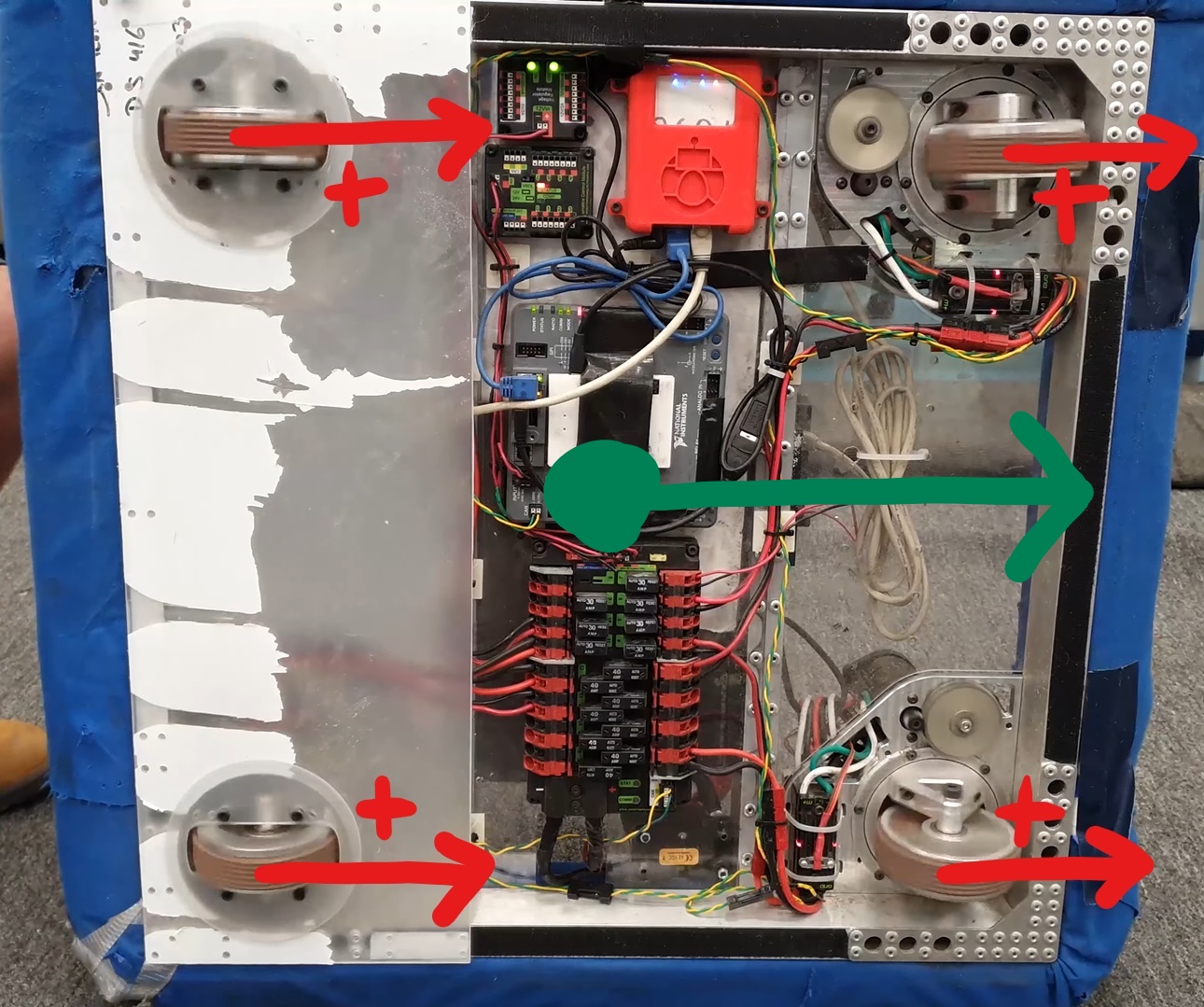
首先,轉動 module ,讓所有的輪子都面對同一個方向。然後,確保 throttle 馬達 有正面動力時,所有的輪子會轉同一個方向。
把每個 module 的 rotor encoder 數值記錄在 Constants.java 裡。
1public static final double kLeftFrontRotorOffset = -1 * LEFT_FRONT_ANGLE;
2public static final double kRightFrontRotorOffset = -1 * RIGHT_FRONT_ANGLE;
3public static final double kLeftRearRotorOffset = -1 * LEFT_REAR_ANGLE;
4public static final double kRightRearRotorOffset = -1 * RIGHT_REAR_ANGLE;
備註
Rotor 的偏移量會被加到 rotor encoder value。這是 rotor 偏移量要乘於 -1 的原因。
Rotor 馬達 & Encoder Inversion
Rotor 馬達和 encoder 可能需要倒置。當 rotor motor 有 正面動力時,rotor encoder 的
數值應該要增加。如果不是這樣,你會需在 Constants.java 裡,把 馬達 / encoder 的
boolean value 改成 true。這樣就可以倒置 rotor 馬達或 encoder。
1public static final boolean kRotorEncoderDirection = false;
2public static final boolean kRotorMotorInversion = false;
Swerve Kinematics
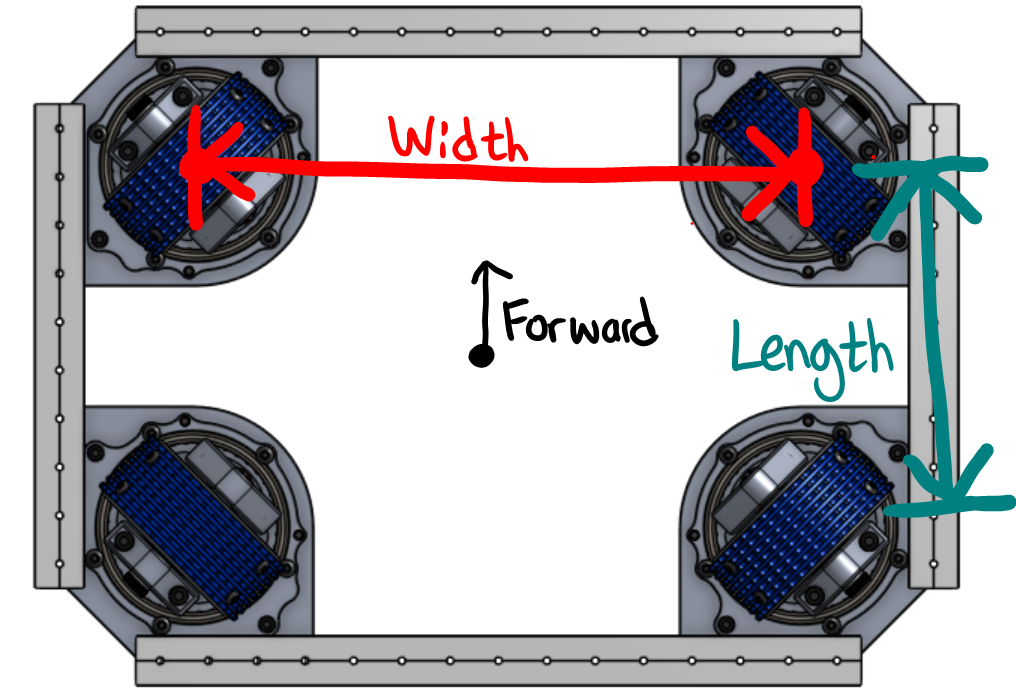
紀錄機器人的長度與寬度(已米為單位)。因為正面 X 是往前,而正面 Y 是往 左,configuration 應該要長得像這樣。
1// Swerve module 順序:左前,右前,左後,右後
2public static final SwerveDriveKinematics kSwerveKinematics = new SwerveDriveKinematics(
3 new Translation2d(LENGTH/2, WIDTH/2),
4 new Translation2d(LENGTH/2, -WIDTH/2),
5 new Translation2d(-LENGTH/2, WIDTH/2),
6 new Translation2d(-LENGTH/2, -WIDTH/2)
7);
多餘的 Constants
最大速度 / 加速度
請紀錄機器人最大的速度與加速度(米)。
1public static final double kMaxVelocityMetersPerSecond = 0.0;
2public static final double kMaxAccelerationMetersPerSecond = 0.0;
Throttle 齒輪比率
請紀錄 throttle 齒輪比率(馬達轉動輪子一圈所需的圈數)。
1public static final double kThrottleGearRatio = 0.0;
Throttle 轉換 Constant
使用以上的 constant,你可以算出從 throttle encoder 速度轉換成線性速度(米/秒)所需要的轉換 constant。
Position Constant
\(conversion = \frac{1}{gear ratio} \times {wheel diameter} \times \pi\)
1public static final double kThrottleVelocityConversionFactor =
2 1/kThrottleGearRatio*kWheelDiameterMeters*Math.PI;
\(conversion = \frac{1}{gear ratio} \times \frac{1}{2048} \times {wheel diameter} \times \pi\)
備註
The \(\frac{1}{2048}\) is used to convert from Falcon encoder ticks to rotations.
1public static final double kThrottleVelocityConversionFactor =
2 1/kThrottleGearRatio/2048*kWheelDiameterMeters*Math.PI;
Velocity Constant
\(conversion = \frac{1}{gear ratio} \times \frac{1}{60} \times {wheel diameter} \times \pi\)
1public static final double kThrottleVelocityConversionFactor =
2 1/kThrottleGearRatio/60*kWheelDiameterMeters*Math.PI;
\(conversion = \frac{1}{gear ratio} \times \frac{1}{2048} \times {wheel diameter} \times \pi \times 10\)
備註
乘於 \(10\) 是為了要從 100ms 轉換成 1s,因為 Talon FX 是使用 100ms 來 量速度的。 \(\frac{1}{2048}\) 是用來把 Falcon encoder tick 轉換成圈數。
1public static final double kThrottleVelocityConversionFactor =
2 1/kThrottleGearRatio/2048*kWheelDiameterMeters*Math.PI*10;